无(wú)人机航测(cè)-正(zhèng)射影(yǐng)像解决(jué)方案
1- RTK 无人(rén)机一套、飞行技(jì)能培训
2- 差分GPS解算软件一(yī)套、差分GPS解算软件解(jiě)算流程培训
3- Smart3D一(yī)套(tào)
(1) Smart3D空三加密和三维(wéi)建模设置方法
(2) 工程操(cāo)作讲解(工程创(chuàng)建,JOB路径配置)
(3) 像控点刺(cì)点(diǎn)方(fāng)法
(4) Samrt3D加像控(kòng)点和不(bú)加像控(kòng)点的处理方法(fǎ)
(5) 成果提交数据(jù)格式处理(lǐ)(成果类型介绍,通(tōng)用OSGB数据格式设置和输出)
4- EPS一套
(1) 倾(qīng)斜(xié)摄影三维模型导入EPS测图(tú)方法
(2) EPS 采集地物要素的方法
(3) EPS 采(cǎi)集等(děng)高(gāo)线的(de)方法
5- 航测生产(chǎn)技术培训
以实际项目为例,从航飞路线(xiàn)设(shè)计、外业相控(kòng)选点、CORS站或千寻网(wǎng)测量方法、飞(fēi)行注意事(shì)项、内(nèi)业数据处(chù)理、EPS数据采集等方面综(zōng)合培训
方案简(jiǎn)介
1. 基(jī)于大疆(jiāng)4PRTK的1:500地(dì)形图生产
整(zhěng)体解决方案(àn)
(1) 技术路线
1.1
整体技术路线如下图所(suǒ)示:

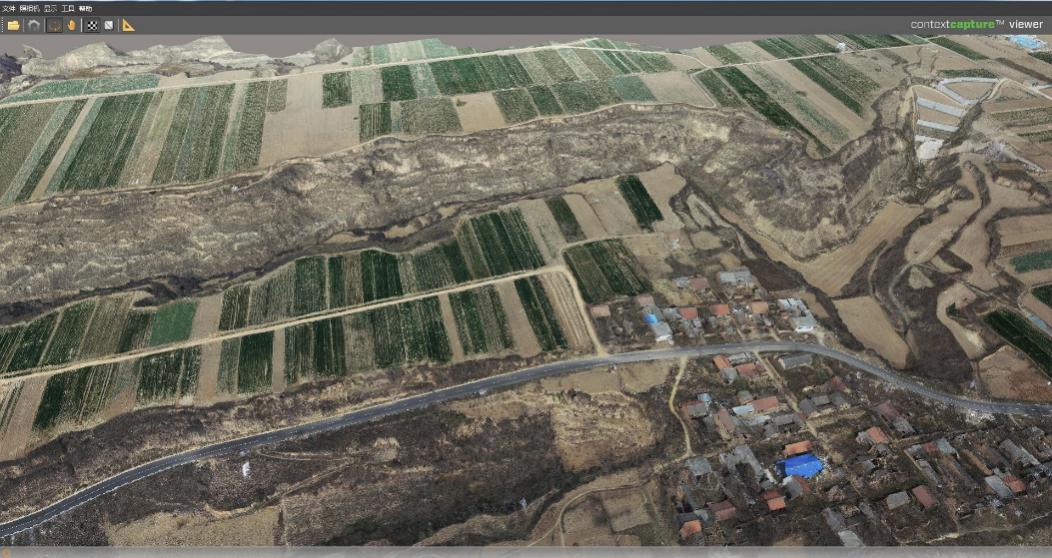
1.2以陕西(xī)省(shěng)韩城(chéng)某区(qū)域1:500地形图(tú)测量(liàng)为例,测区面积0.6平方公里。
如图所(suǒ)示为:
无人(rén)机航拍")
整个(gè)数据生产包括如下步骤:
(1) 像控点(diǎn)布设与测量:该地形图(tú)为带状(zhuàng),沿周边布设像控点12个,测区(qū)内(nèi)布设像控点3个(gè),并用千寻网测量
(1) 无(wú)人机外业航飞:在4PRTK地面站上(shàng)新建工程,导入预先(xiān)设(shè)计(jì)好的kml文(wén)件(kml指测区(qū)范(fàn)围文件(jiàn),也可(kě)以(yǐ)现场规(guī)划飞行区(qū)域);航(háng)高(gāo)120米,设置(zhì)为等距拍照,重叠率航(háng)向80%,旁向60%;打开地面站(zhàn)上镜头的畸变(biàn)纠正
(2) 内业数据处理:
差分GPS解(jiě)算:利用机载差分GPS软件(jiàn)进(jìn)行解算,得到(dào)相片的差分数据
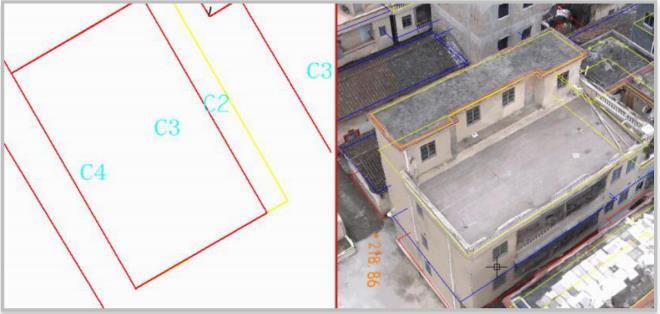
三维建模:在(zài)smart3d中,首先(xiān)新建工(gōng)程(chéng),导(dǎo)入相片后将差分(fèn)GPS数据导入,设置好路径(jìng)后进行(háng)空三(sān)加密(mì),然后刺像控点(diǎn),再跑空三,.后进行三维建模。如下图所示(shì):
Smart3D三维建(jiàn)模
三维测(cè)图:将三维建模导出OSGB数据格(gé)式,导入EPS进行裸眼立体测图。EPS裸眼立体(tǐ)测图技术流程如下:
EPS裸(luǒ)眼立体测图
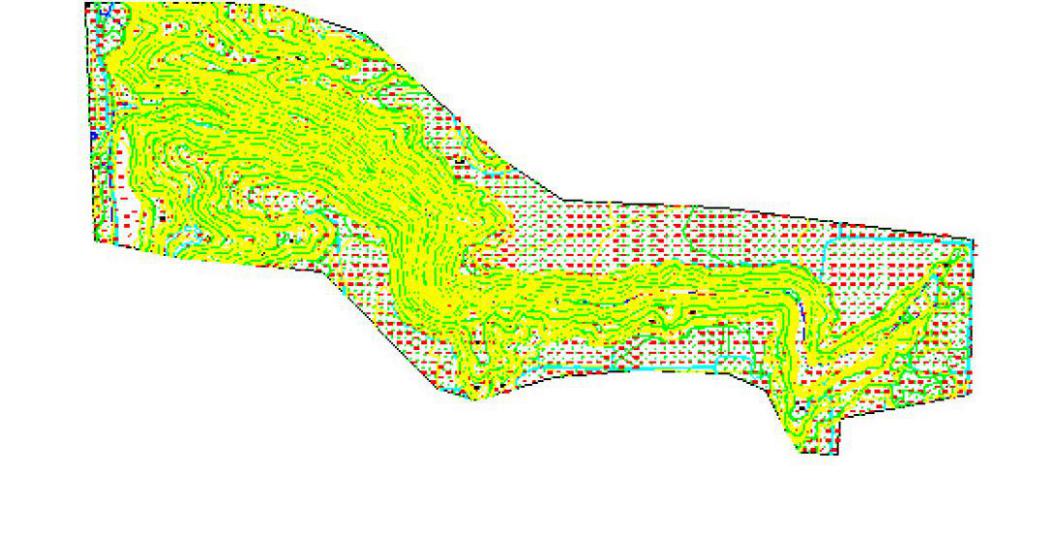
EPS:500地形(xíng)图采编